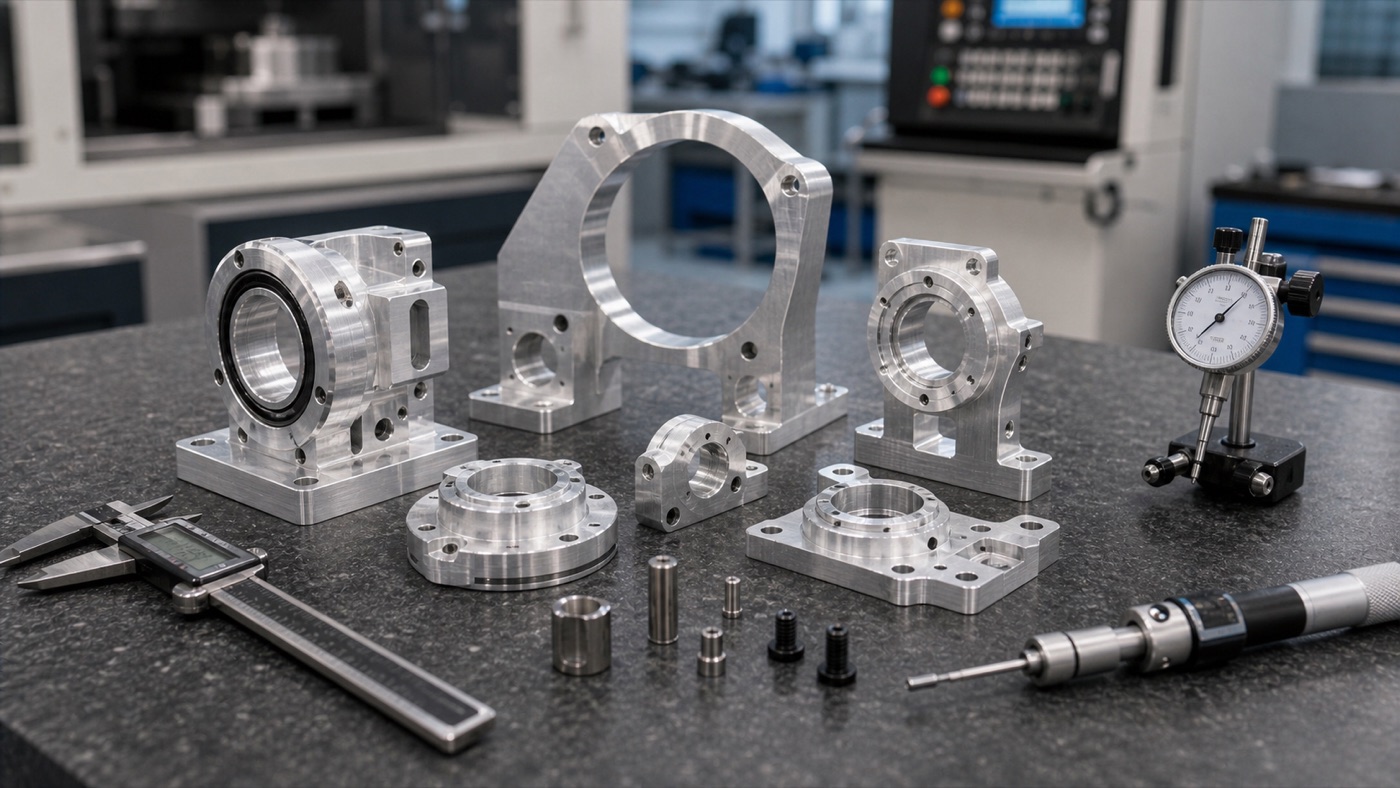
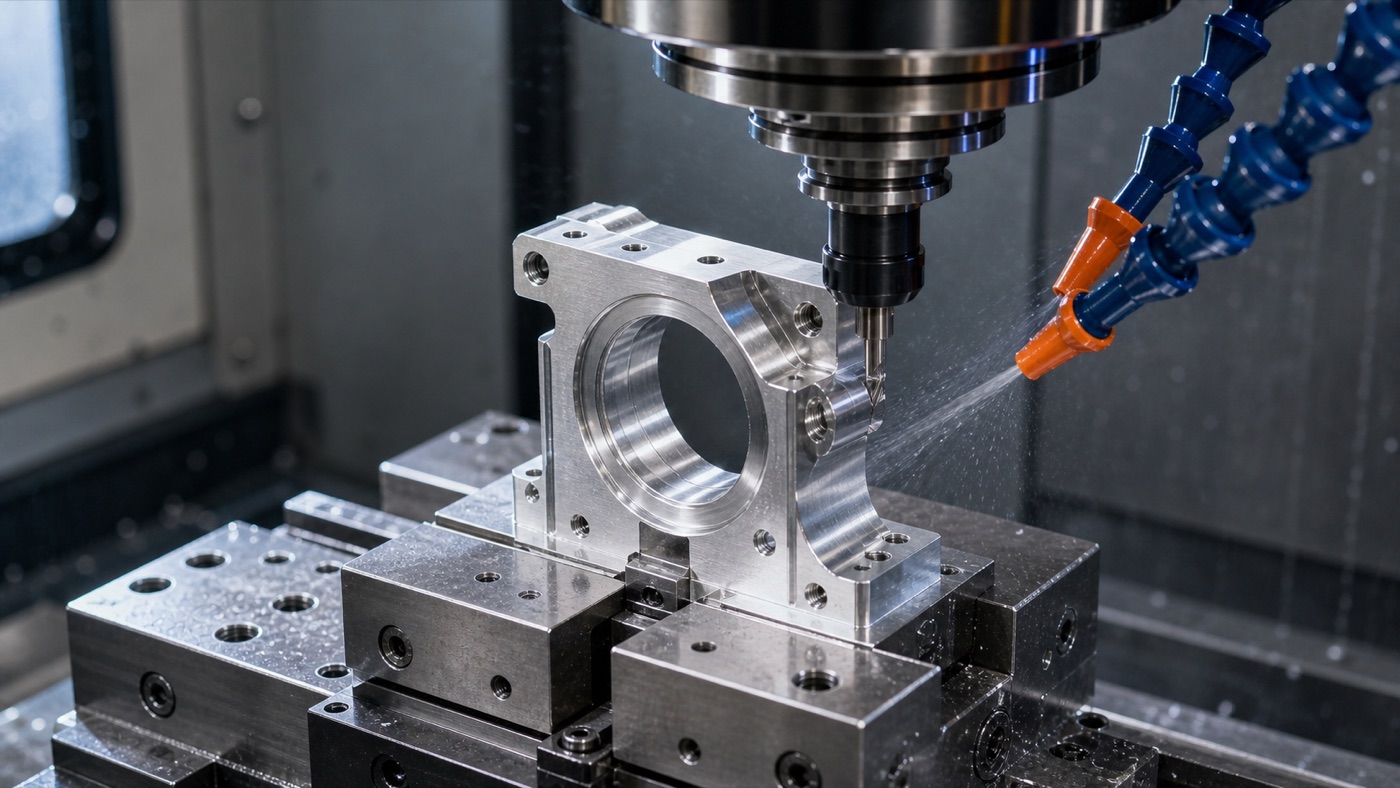
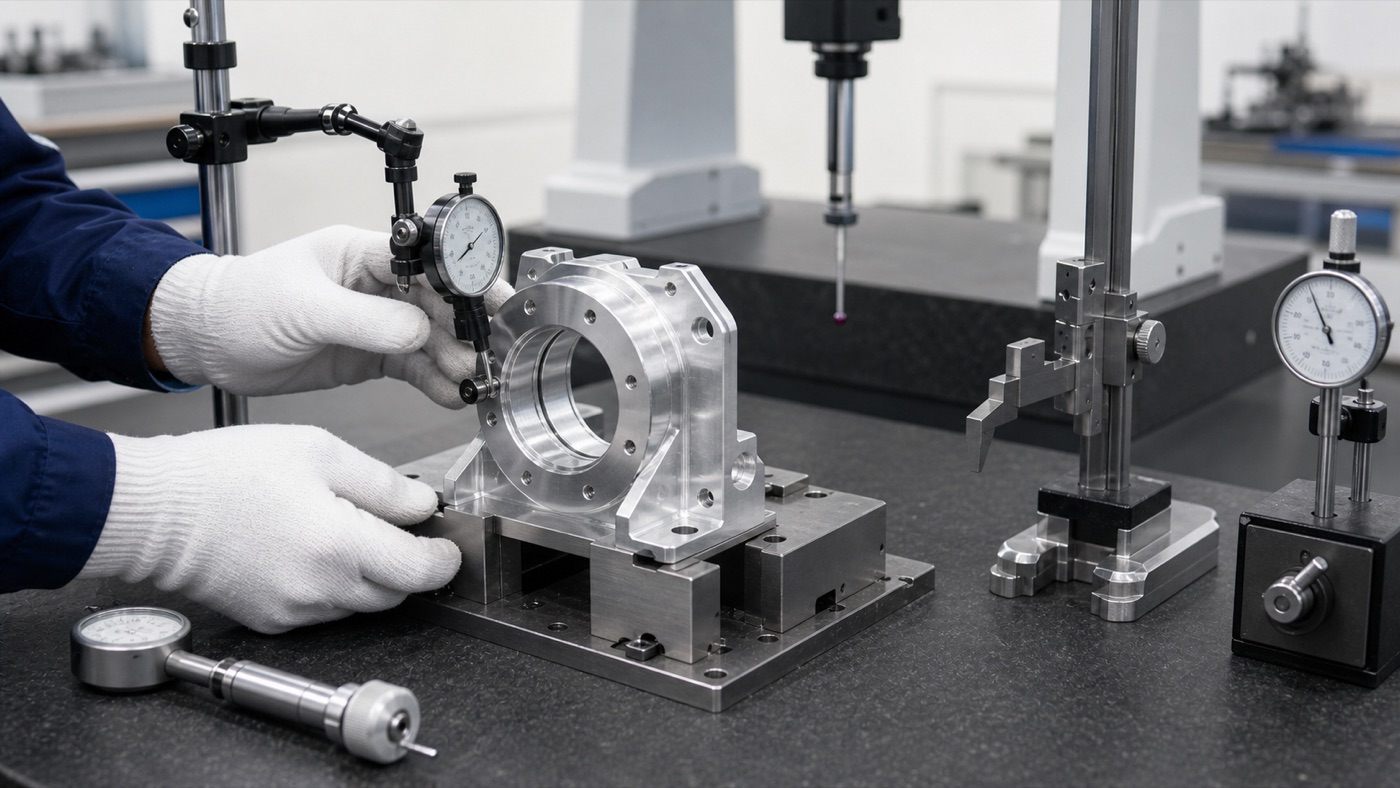
机器人部件精密加工
机器人部件精密加工
180-5185-7059

微信同号
扫码咨询